This function reads the momentary motor current draw and uses this value to recalculate the average current consumption. The new calculated value is stored in mg_u16Sum and is checked for an error condition. The frequency of calling this function and the size of the mg_au16Data array define the span of time used for calculating the motor current sum. An example: SUM_COUNT = 20 and calling current_UpdateSum() every 512ms (see application loop in main()) results in a time span of 10.24s.
Definition at line 189 of file current.c. References ADC_CURRENT, adc_Read(), COND_CURR_ERR, COND_CURR_WARN, MAX_CURRENT, mg_au16Data, mg_u16Sum, mg_u8SumIdx, safety_ClearCondition(), safety_SetCondition(), and SUM_COUNT. Referenced by main(). {
/* get momentary current value */
UINT16 u16Help = adc_Read(ADC_CURRENT);
/* insert in ring array */
mg_au16Data[mg_u8SumIdx] = u16Help;
mg_u8SumIdx++;
if(mg_u8SumIdx >= SUM_COUNT)
{
mg_u8SumIdx = 0U;
}
/* recalculate new sum from array */
u16Help = 0U;
for(UINT8 i=0U; i<SUM_COUNT; i++)
{
u16Help += mg_au16Data[i];
}
mg_u16Sum = u16Help;
/* check for current overload */
if(mg_u16Sum > (MAX_CURRENT * SUM_COUNT))
{
safety_SetCondition(COND_CURR_ERR);
safety_ClearCondition(COND_CURR_WARN);
}
else
{
safety_ClearCondition(COND_CURR_ERR);
}
}
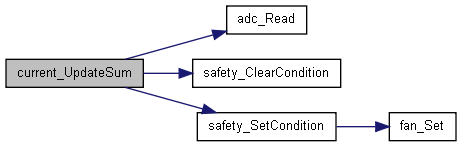
Here is the call graph for this function:
Here is the caller graph for this function:
 |